Kihomac - Uncrewed Underwater Vehicle (RIPTIDE)
Team: Adam Cline, Erik Goodwin, Caleb Muhlestein, Hayden Steele and Jason Stone
Project Description:
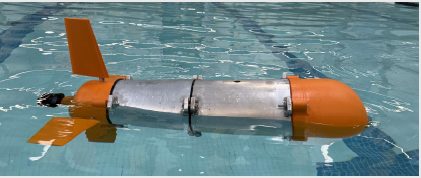
This project focused on developing a modular uncrewed underwater vehicle (UUV) platform that can be reconfigured for a variety of mission needs. RIPTIDE (Reactive, Independent, Prototype for Tactical, Investigation, Detection, and Exploration) is a modular submarine designed to autonomously carry a payload while submerging to a maximum 2m depth.

R.I.P.T.I.D.E Design:

Payload Module: Front area of the submersible with space to contain a payload.

Ballast Module: Water intake is controlled by a spring-loaded plug. A servo and lever arm pulls the plug downward to start water intake and dive. To ascend, air is pumped into the ballast, and the water is expelled.

Control Module: Houses the 14.8 V battery, pressurized air cannister, solenoid, Raspberry Pi Pico, sensory peripherals, and the power management bus. The Control Module is the "Brain" of RIPTIDE.

Propulsion Module: Rear section of the submersible housing the actuated fin system and main propellor. Openly connects to the Control Module to receive steering and thrust controls.
Test Data
Performance requirements were tested in a controlled pool setting. The following tests were completed to verify each metric individually: Watertightness, Cruise Velocity, Battery Runtime, Depth Control, and Turn Rate.
XFoil (wing analysis software) was used to find the best fin profile. SolidWorks flow simulation was used for nose profile.


Performance Review:
Numerous pool tests were performed to determine actual performance outcomes
| Requirement | Target | Threshold | Actual |
|---|---|---|---|
| Pitch/Yaw Rate | 45°/s | 30°/s | 43.36°/s |
| Turn Radius | 2 m | 4 m | 1.98 m |
| Cruise Speed | 1.5 m/s | 1.0 m/s | 1.5 m/s |
| Ascension Rate | 0.2 m/s | 0.1 m/s | 0.192 m/s |
| Submersion Rate | -0.2 m/s | -0.1m/s | -0.912 m/s |
| Max Depth | 2 m | 1 m | 2m |
| Payload Effective Volume | 125 in3 | 100 in3 | 137.5 in3 |
| Min Runtime | 1 hr | 0.5 hr | 2.37 hrs |
Conclusion
Results:
- RIPTIDE meets all performance requirements and project expectations.
Lessons Learned:
- Waterproofing needs to be intentional.
- Use iterative prototyping to refine overall design and mission functionality.
- Plan time to fail rather than assume success on a tight deadline.
Future Work:
- Improve cable management for an easier assembly and use experience.
- Install a power supply to the payload.
- Design a more robust control feedback loop for true autonomous performance.