USU Mars Rover 2025 - SOPHIA
2025 University Rover Challenge (URC) Team Finalist
Team: Jonathan Wiggins, Garrett Richardson, James Peck, Marissa Morgan, McLean Jones, Andres Buval, and Samuel Browning
Sponsor: USU COE
Project
During the 2024-2025 academic year, seven Capstone students and additional Rover Team members have progressed previous years’ progress building a rover to compete in URC, a challenge created by the Mars Society for universities around the world.
Held annually at the Mars Desert Research Station in Hanksville, Utah, the URC simulates the challenges of rovers in the Mars environment through four unique missions. This year, 114 teams from 15 different countries signed up, and we were selected as one of 38 finalists to attend.
Control of the rover is achieved through the Robot Operating System (ROS) framework. ROS handles all mechanical systems, processes running, and data collection and display. Our rover is built to perform in the URC’s delivery mission, equipment servicing mission, science mission, and autonomous navigation mission.
Tasks demanded include:
- Drilling and collecting soil samples
- Testing samples for markers of life
- Opening hinged boxes and carrying objects between locations
- Manipulating tools (a keyboard, a USB stick, drawers, levers, knobs, buttons)
- Autonomously driving while avoiding obstacles
- Autonomously navigating between assigned GPS coordinates
- Autonomously detecting assigned objects
Design
Science Module
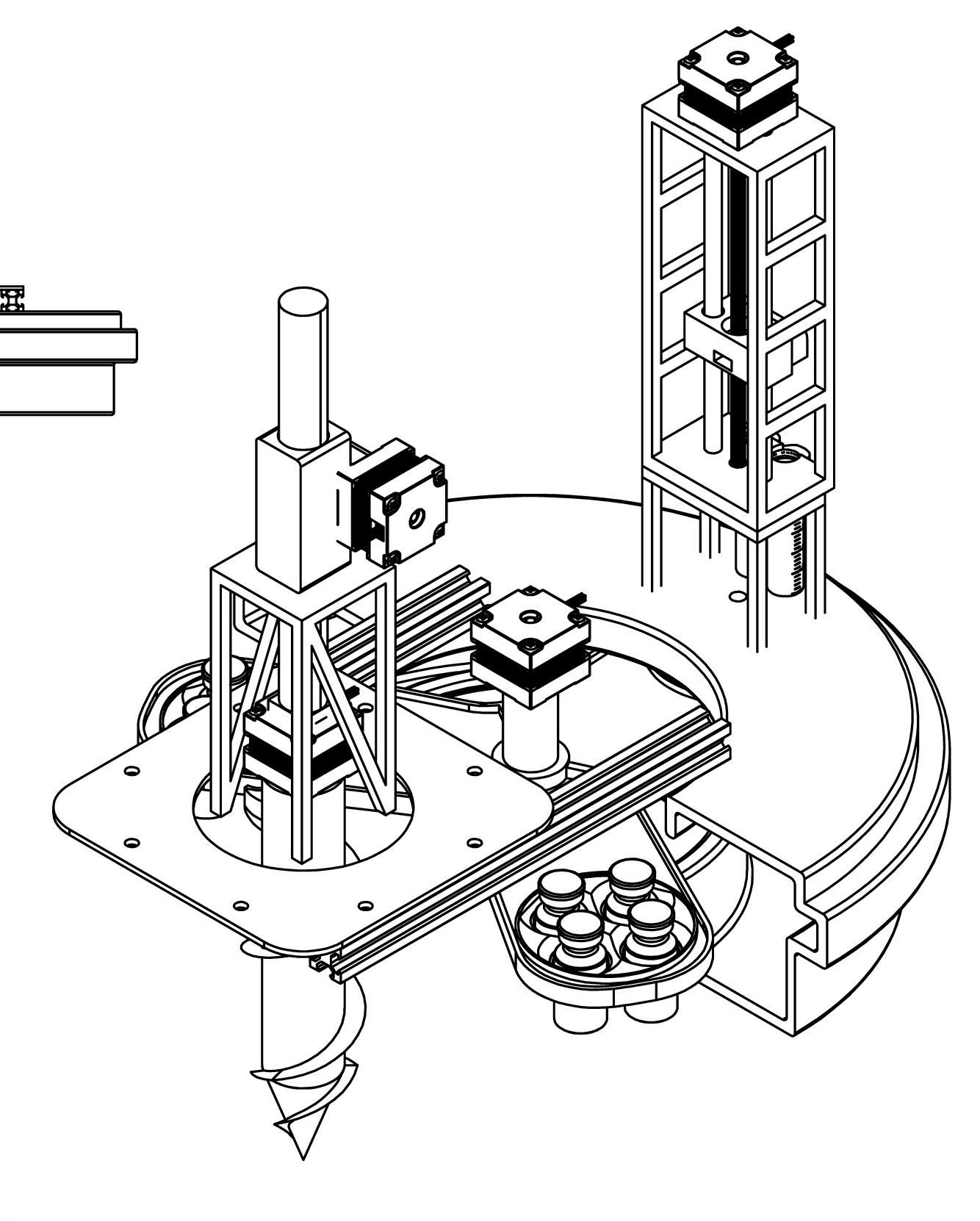
Auger, carousel, and dark room CAD assembly
Chassis

Chassis, wheels, and mounted arm CAD assembly
Robotic Arm

Linear actuator arm with modular geared gripper
Controls

ROS visualizer path-planning cost map
Electronics

Rover wiring diagram
Drone

Drone CAD model
Performance
We based our testing on several performance variables.
| Variable | Unit | Target | Threshold | Performance |
|---|---|---|---|---|
| Radio range | km | 1.5 | 1.0 | 1.1 |
| Rover dimensions | m³ | 1.10 x1.10 x 1.10 | 1.20 x 1.20 x 1.20 | 1.12 x 1.20 x 1.18 |
| Rover arm config. weight | kg | 49.0 | 50.0 | 51.8 |
| Rover science config. weight | kg | 49.0 | 50.0 | 46.9 |
| Aggregate rover parts weight | kg | 68.0 | 70.0 | 56.8 |
| Operating time | min | 72 | 60 | 120 |
| GPS location accuracy | m | 10.0 | 20.0 | 0.5 |
| Suspension clearance | m | 0.25 | 0.15 | 0.32 |
| Mass lifted | kg | 6.0 | 5.0 | 7.3 |
| Frame clearance lifting 5 kg | m | 0.40 | 0.20 | 0.71 |
| Soil sample mass | g | 50 | 5 | 90 |
| Soil sample depth | cm | 11 | 10 | 17 |
| Drone mass with dummy | kg | 3.5 | 5.0 | 3.3 |
| Drone cruising speed | m/s | 15 | 5 | 15 |
| Drone operating time | min | 72 | 60 | 65 |
| Drone flight time | min | 10 | 1 | 7 |


Rover and Drone with our Omni Directional Antennas
Our Rover

Conclusion
Working on the rover project gave us extensive experience working in a team on a long-term project. We learned that most work for a robotics project is developing code and testing features.
Our rover is successfully driving over rough terrain, communicating at high ranges, drilling soil, and operating for long periods. Additional development and testing of navigation features and object manipulation are required to succeed in the URC missions. We are continuing to prepare and are excited to attend May 28, 2025!
For future USU Rover Team members, we encourage developing ROS code early and testing extensively. Reliable communication and control should be prioritized highly.
Thank you to Professor Jackson Graham and Amanda Olsen for advising us. Thank you to our sponsors for their support!