Swarm-Optimized Marine Robot
Team: Allison Bernhardt, Abraham Meyer, Cody Robinson, Topher Rosenlund, Brit Rossi, Cody Grogan
Sponsor: KIHOMAC
Project Description
Unmanned Underwater Vehicles (UUVs) have the potential to revolutionize underwater operations, e.g. search and rescue, mining, and reconnaissance. Often, these tasks are accomplished more effectively by a team of robots. Thus, UUVs that can swarm efficiently are needed. The objective of the project is to develop a compact, relatively cheap prototype UUV so large numbers of the UUV can be manufactured for swarm research.
Constraints & Requirements
- 3+ degrees of freedom
- Remote control
- Obtain a depth of 3+ meters
- Volume less than 0.01 cubic meters
- Waterproof for 2+ hours
- Accommodate sensors and batteries
- Be neutrally buoyant
- Cost no more than $1500
Performance Review
- 4 degrees of freedom
- Remote control via cable
- ROS Software
- Dive depth of 1 meter (pool test)
- Volume: 0.007 cubic meters, mass: 7 kg
- Electronics volume: 0.003 cubic meters
- Within ±200 grams of neutral buoyancy
- Total cost of $1086.00
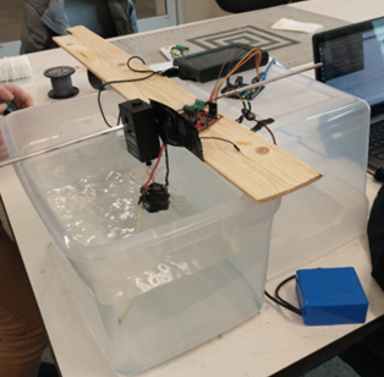
Design


Above: Flowchart of major design components of the UUV Right: Final integrated UUV with all components (excluding controller and bay station computer)
Analysis & Testing

SolidWorks CFD simulations determined the drag coefficient of the UUV hull to be 0.634. SolidWorks measurement also determined the volume and mass needed to achieve neutral buoyancy.
Thrust experiments performed on the motors and propellers demonstrated a potential thrust of 4.29 N and a maximum theoretical velocity of 1.26 m/s. These tests also demonstrated the water-resistance of the motors.

Tests performed on the combined electronics module verified the ability of ROS software to control the motors from the bay station computer as well as the ability of the IMU sensor to report acceleration data.

Full operations in the pool were tested during the final phases of the project to determine the effectiveness of the UUV in the areas of waterproofing, neutral buoyancy, and maneuverability.
Conclusion
The finished UUV was able to meet most of the specifications for the project, including degrees of freedom, remote control integration, and neutral buoyancy, however it failed to meet the threshold for dive depth, waterproof time, and underwater velocity.
Lessons learned:
- The importance to consider the impacts of the supply chain on the schedule and ordering parts
- Designing systems modularly to avoid making testing dependent on the whole system being finished
- Beginning the project with a systems engineering mindset in order to address subsystem tradeoffs early
Future Work:
- Make UUV more compact
- Improve maneuverability
- Improve waterproof sealing
- Add onboard buoyancy control
- Make UUV autonomous
- Coordinate movement of multiple UUVs
The team would like to thank Professor Som Dutta for mentoring the team and KIHOMAC for funding this project.
Hull Team:
- Allison Bernhardt - allison.bernhardt@usu.edu
- Abraham Meyer - abehammer1@gmail.com
- Cody Robinson - codewrobinson@gmail.com
Electronics Team:
- Cody Grogan - a02313514@usu.edu
- Topher Rosenlund - topherrosenlund@gmail.com
- Brit Rossi - brittrossi24@gmail.com