Pigeon Post - The Modern Homing Pigeon L3Harris
Team: Lance Ford, Spencer Kimball, Sage Mathews, Alex Mcfarland, Joseph Lamb, Kevin Naegle
Sponsor: L3Harris
Project Description
Build a lightweight, modular, fixed wing, autonomous drone to return data storage devices from a frontline combat situation. The drone must be impervious to jamming and should automatically orient itself and return to its home base.
| Requirment | Target | Threshold | Predicted Performance |
|---|---|---|---|
| Cost | $300 | $500 | $300 |
| Field Training Time | 30 min | 60 min | 30 min |
| Base Support Training Time | 120 min | 180 min | 100 min |
| Reusable | 30 Flights | 5 Flights | 30 Flights |
| Sound level from 300 ft | 30 dB | 45 dB | 30 dB |
| Fly in Crosswinds | 20 mph | 10 mph | 20 mph |
| GPS Location Error | 2 m | 15 m | 2.5 m |
| Obstacle Avoidance | 20 m | 10 m | 20 m |
| Travel Distance | 80 miles | 20 miles | 21.1 - 29.0 miles |
| Weight | 2 pounds | 5 pounds | 2.65 pounds |
| Airspeed | 60 mph | 20 mph | 45 – 50 mph |
| Calibration Time | 30 sec | 120 sec | 64 sec |
| Horizontal Distance to Altitude | 100 meters | 200 meters | 239 meters |
| Package Volume | 5 L | 9 L | 4.9 L |
| Steps to Launch | 5 steps | 8 steps | 7 steps |
Highlighted Customer Restraints/Requirements target
- The device shall weigh less than 2 pounds
- The device shall be capable of flying 60 mph for a distance of 80 miles
- The device shall be modular and fit into a 5L volume
- The device shall employ obstacle avoidance
- The device shall cost under 300$
Design Description
- Initial calculations were made using USU MachUp to size the wings needed to create the needed lift for the drone.
- This lift was then confirmed using a 3D printed airfoil and a wind tunnel
- Next different battery, propeller, and motor combinations were tested to find the optimum combination for the required thrust and minimum power consumption.
- Aircraft geometry was designed around these parameters.
- Autopilot system was selected and researched in parallel

| Wingspan (in) | Speed (mph) | Drag of Wing (lb) | Lift (lb) |
|---|---|---|---|
| 26" | 40 | .16 | 1.71 |
| 26" | 45 | .20 | 2.16 |
| 26" | 50 | .24 | 2.67 |
| 26" | 55 | .30 | 3.23 |
| 30" | 40 | .17 | 2.04 |
| 30" | 45 | .21 | 2.57 |
| 30" | 50 | .26 | 3.18 |
| 30" | 55 | .31 | 3.85 |
| 36" | 40 | .17 | 2.53 |
| 36" | 45 | .22 | 3.20 |
| 36" | 50 | .27 | 3.95 |
| 36" | 55 | .33 | 4.78 |

| Motor | Propeller | Battery | Throttle % | Thrust (lb) | Efficiency (kgf/W) | Current (A) |
|---|---|---|---|---|---|---|
| Xing 2207 2450KV | 5x5 | 3s | 60 | 0.51002 | 0.001358 | 14.488 |
| Xing 2207 2450KV | 5x5 | 3s | 100 | 0.77653 | 0.001295 | 23.586 |
| Xing 2207 2450KV | 5x5 | 4s | 60 | 0.80718 | 0.001115 | 20.316 |
| Xing 2207 2450KV | 5x5 | 4s | 100 | |||
| Xing 2207 2450KV | 6x4 | 3s | 60 | 1.02584 | 0.002680 | 14.999 |
| Xing 2207 2450KV | 6x4 | 3s | 100 | |||
| Xing 2207 2450KV | 6x4 | 4s | 60 | 1.35160 | 0.002129 | 17.925 |
| Xing 2207 2450KV | 6x4 | 4s | 100 | |||
| Readytosky RS2205 2300KV | 5x5 | 3S | 60 | 0.26599 | 0.001884 | 5.489 |
| Readytosky RS2205 2300KV | 5x5 | 3S | 100 | 0.47347 | 0.001756 | 10.704 |
| Readytosky RS2205 2300KV | 5x5 | 4S | 60 | 0.45940 | 0.001584 | 8.112 |
| Readytosky RS2205 2300KV | 5x5 | 4S | 100 | 0.77734 | 0.001363 | 16.168 |
| Readytosky RS2205 2300KV | 6x4 | 3S | 60 | 0.54583 | 0.003757 | 5.698 |
| Readytosky RS2205 2300KV | 6x4 | 3S | 100 | 0.93318 | 0.003256 | 11.490 |
| Readytosky RS2205 2300KV | 6x4 | 4S | 60 | 0.93418 | 0.003075 | 8.541 |
| Readytosky RS2205 2300KV | 6x4 | 4S | 100 | 1.45405 | 0.002393 | 17.357 |
| Readytosky RS2205 2300KV | 7x6 | 3S | 60 | 0.69651 | 0.002646 | 10.558 |
| Readytosky RS2205 2300KV | 7x6 | 3S | 100 |


Performance Review
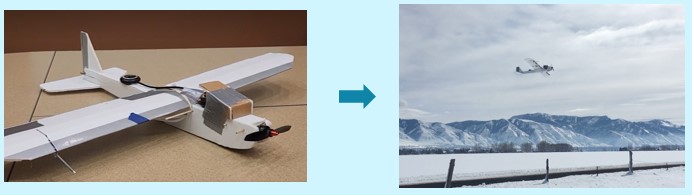
Hardware Team

- Implementation was split into a hardware build team and a software team.
- The Hardware build team built an experimental plane to test flight characteristics and optimized its design.
- The Software build team bought a foam plane to research and test the autopilot software on.
- Both teams went through multiple test iterations to arrive at the final design.
- Nearly 10 different test flight days were conducted
- These Iterations led to upgrades in wing design to feature a composite material and calibration of the autopilot software used.
Software Team
Conclusion
Accomplishments:
- Analysis, testing, and manufacture of an efficient modular drone.
- Creation of an autonomous control system.
Lessons Learned:
- Defining requirements early is important to the success of a project.
- Smaller, low risk tests should be performed more often than higher risk tests.
- Tests should be designed in a way that they do not rely on weather if possible.
Recommended Future Work:
- Design/implement a more efficient fixed-wing flight control system.
- Implement obstacle detection.
- Integrate concurrent design paths