The R6 Drone - Search and Rescue
Team: Tommy Severson

Project Overview
This project focuses on designing a compact, remotely operated ground drone capable of real-time video streaming and precise movement control. Inspired by reconnaissance drones used in tactical environments, the system integrates embedded computing, motor control, and wireless communication. The goal is to create a reliable and responsive platform for remote navigation and surveillance tasks.
System Architecture
The system is built around a Raspberry Pi 5 and an STM32 microcontroller. The Raspberry Pi handles high-level tasks such as video streaming and user input processing, while the STM32 manages low-level motor control. Communication between the two devices is achieved via USB serial, allowing commands to be transmitted efficiently
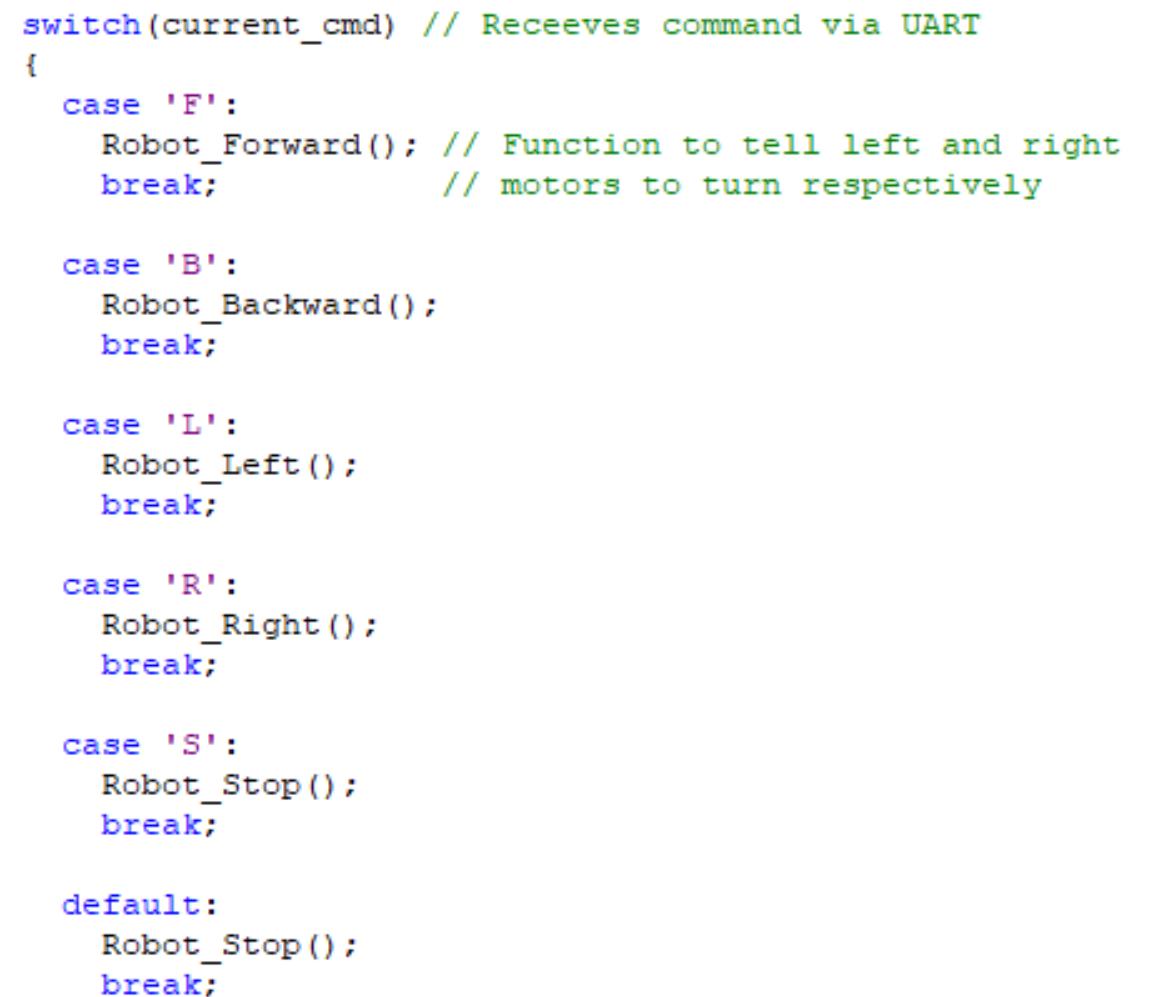
Mobility System
The drone uses a dual-motor drive system controlled through a motor driver. Each motor can be independently controlled to achieve forward, backward, and turning motions. Differential steering enables precise navigation and responsiveness, which is critical for real-time control applications.
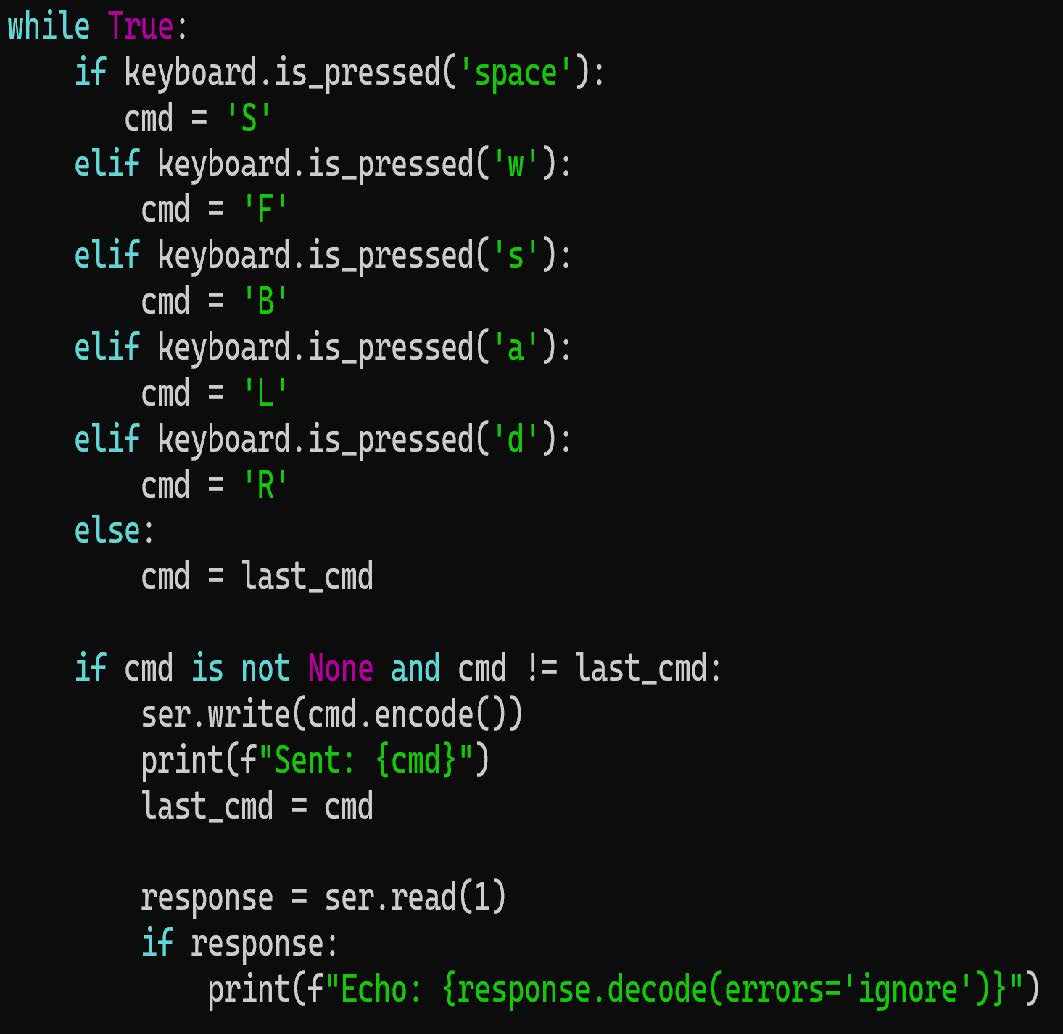
Communication System
User input is captured through a keyboard interface and transmitted to the Raspberry Pi. Commands are then sent to the STM32 via serial communication. The system supports directional commands including forward, backward, left, right, and stop. This architecture allows for low-latency and reliable control.
Video Streaming System
A camera module connected to the Raspberry Pi streams live video using a low-latency protocol (WebRTC). This enables near real-time feedback to the user, allowing for accurate remote navigation and situational awareness.
Power System
The system is powered using a battery connected to a voltage regulator that supplies a stable 5V output. The Raspberry Pi requires a high-current supply (up to ~3A), while the motor driver is powered separately to prevent noise and voltage drops. Proper grounding ensures stable operation across all components. The STM32 is powered by a USB connection through the Raspberry Pi 5.
Results and Conclusions
Results and Conclusions The system successfully demonstrates motor control and command communication between the Raspberry Pi and STM32. Initial testing confirms reliable directional movement and stable power delivery. Video streaming has been implemented with low latency, providing real-time feedback.
Future improvement may include:
- Fire-proofing the System
- Stronger Motors
- Advanced Features (Boost, jumping, etc.)
- System Metrics (Battery life, latency, speed, etc.)
Block Diagram
