The Myo-Bionic Interface
Team: Logan Lancaster
Project
This project demonstrates a cross-disciplinary approach to assistive technology, merging mechanical design, electrical design, and real-time signal processing. Key features include:
- Biocompatible Control: Translates forearm EMG signals into precise motor commands.
- Affordable Fabrication : Utilizes 3D-printed components to significantly reduce production costs.
- User-Centric Interface: Features a modular control system for gesture selection and grip stability.
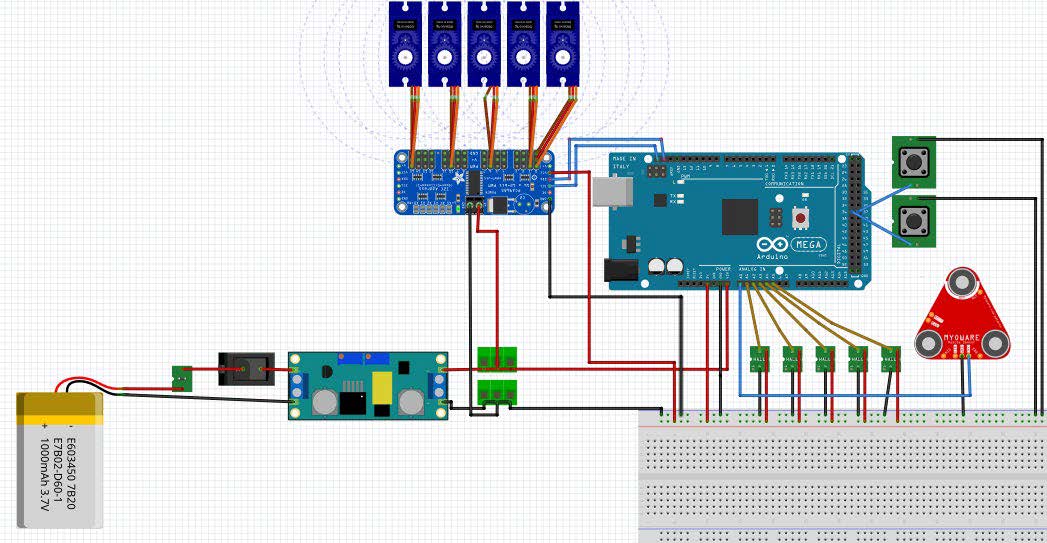
System
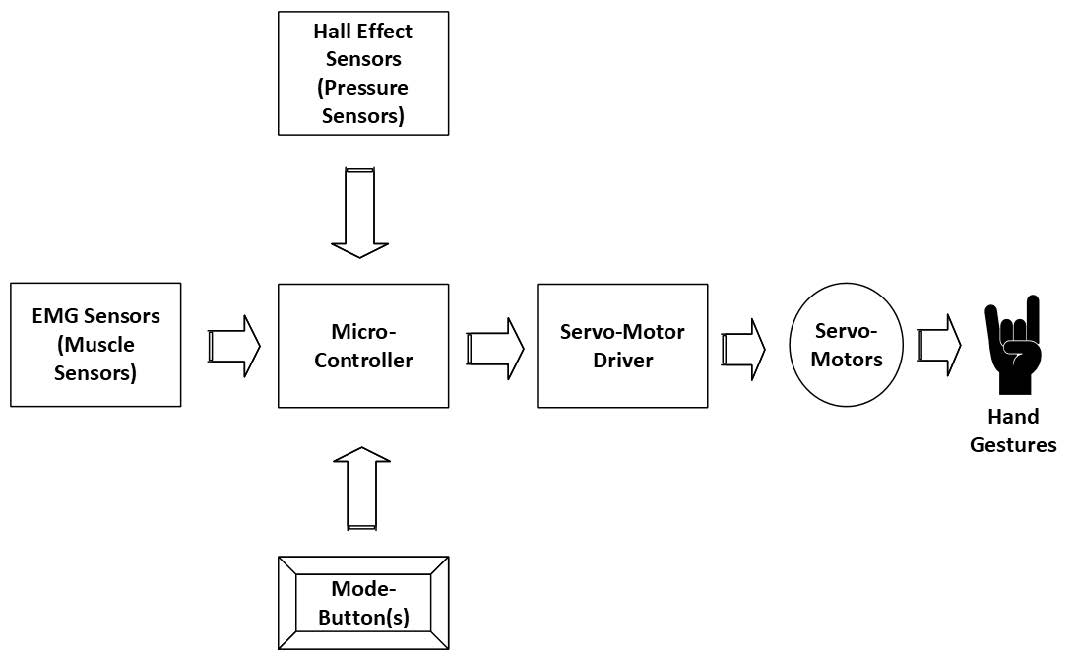
Methods
- Retrieve muscle intent through electromyography sensors on the user's forearm.
- Activate the tendon cables attached from the motors to the fingertips.
- Freeze the fingers in the current position if the freeze button is pressed.
- Move to the next state for hand gesture when the mode button is pressed.
- Calibrate at each start up to make it individual for each user.

Conclusion
The Myo-Bionic interface reliably converts user muscle intent to physical hand gestures in the bionic hand.
Through This Process I Learned:
- How to design, build, and test a product.
- The importance of preparing all specifications before building.
- The impact of 3D printing settings.
Future Improvements:
- Introduce a smaller tolerance in print settings for a tighter fit of the 3D pieces.
- Create a PCB to allow for the power and controls to be housed in forearm.
- Add hall effect sensors to the fingertips to allow for pressure sensing.