SWEEPER Remote/Autonomous Sentry
Team: Gavin Knudsen
Project
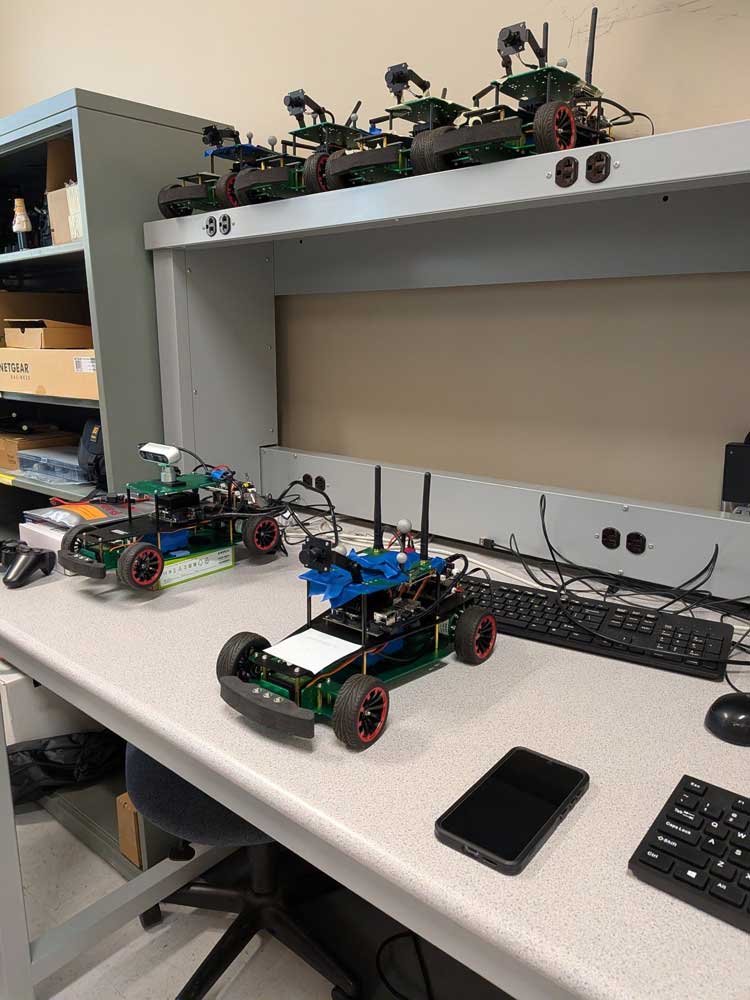
The SWEEPER Sentry Vehicle is an remote and autonomous mobile platform designed to provide real-time humanoid detection and repeatable patrol capabilities using edge-computing hardware and Ackermann steering kinematics.
Objectives:
- Build a modular security platform that avoids the high cost of LiDAR and high-end sensors.
- Implement real-time humanoid detection within the hardware constraints.
- Provide repeatable autonomous patrolling using simplified trajectory-based navigation.
- Demonstrate a stable system that integrates remote manual control and autonomous patrol.
System
Methods
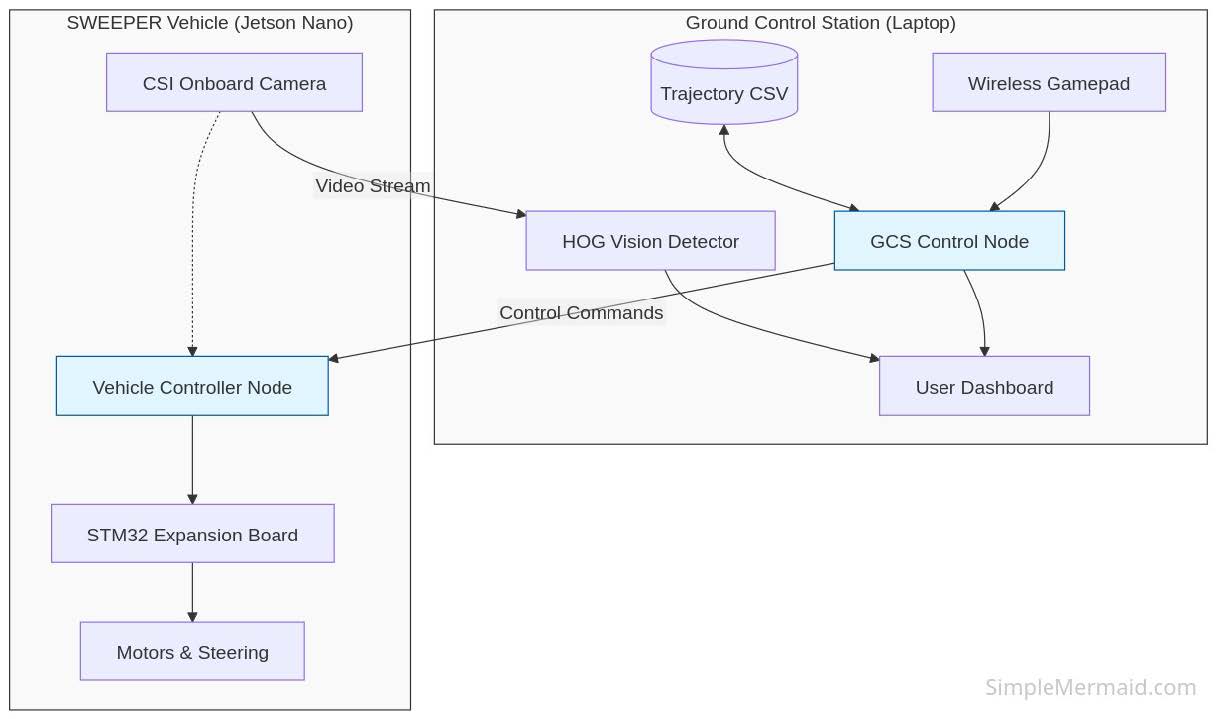
- Developed a ROS 2 control node to enable low-latency remote operation of the vehicle via a wireless gamepad.
- Offloaded vision processing to a remote workstation to run the HOG detector, ensuring high-frequency humanoid identification without taxing the vehicle's CPU.
- Designed a trajectory recording system to capture and replay motor commands, enabling repeatable autonomous patrol loops.
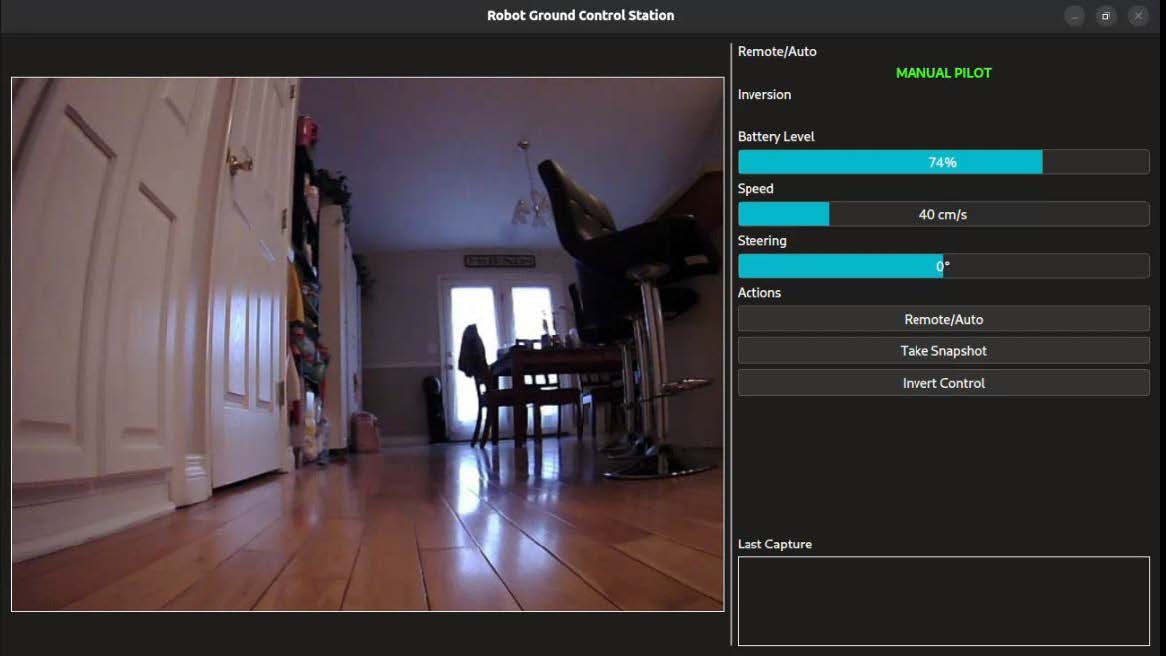
- Integrated a remote monitoring dashboard to provide a live camera feed and a unified interface for manual vehicle override.
Conclusion
- Successful Integration: Validated a low-cost autonomous sentry platform as a functional alternative to expensive commercial sensors.
- Validated Navigation: Confirmed trajectory-based patrol as a reliable, low-compute alternative to LiDAR-based SLAM for fixed routes.
- Distributed Architecture: Proved that offloading vision to a ground station preserves vehicle CPU for critical motor functions.
- Technical Proficiency: Leveraged Docker for cross-platform version parity and optimized network streaming for real-time video data.
- Future Work: Optimize detection for native edge processing and integrate vSLAM for on-the-fly path planning.