Robot Hand
Team: Benjamin Ginnett
Project
- Functional Prosthetics allow disabled people to gain control of prosthetic limbs, but the often cost thousands to tens of thousands of dollars.
- Muscle sensors, 3d filament, microcontrollers, and servos do not cost thousands of dollars.
- Our Goal: create a functional “hand” that costs less than $200, is capable of executing the user’s desired movement with little to no delay, and can grasp and hold an object in place.
- Functional prosthetics will become more and more functional with time, cheap alternatives should begin entering the market.
System
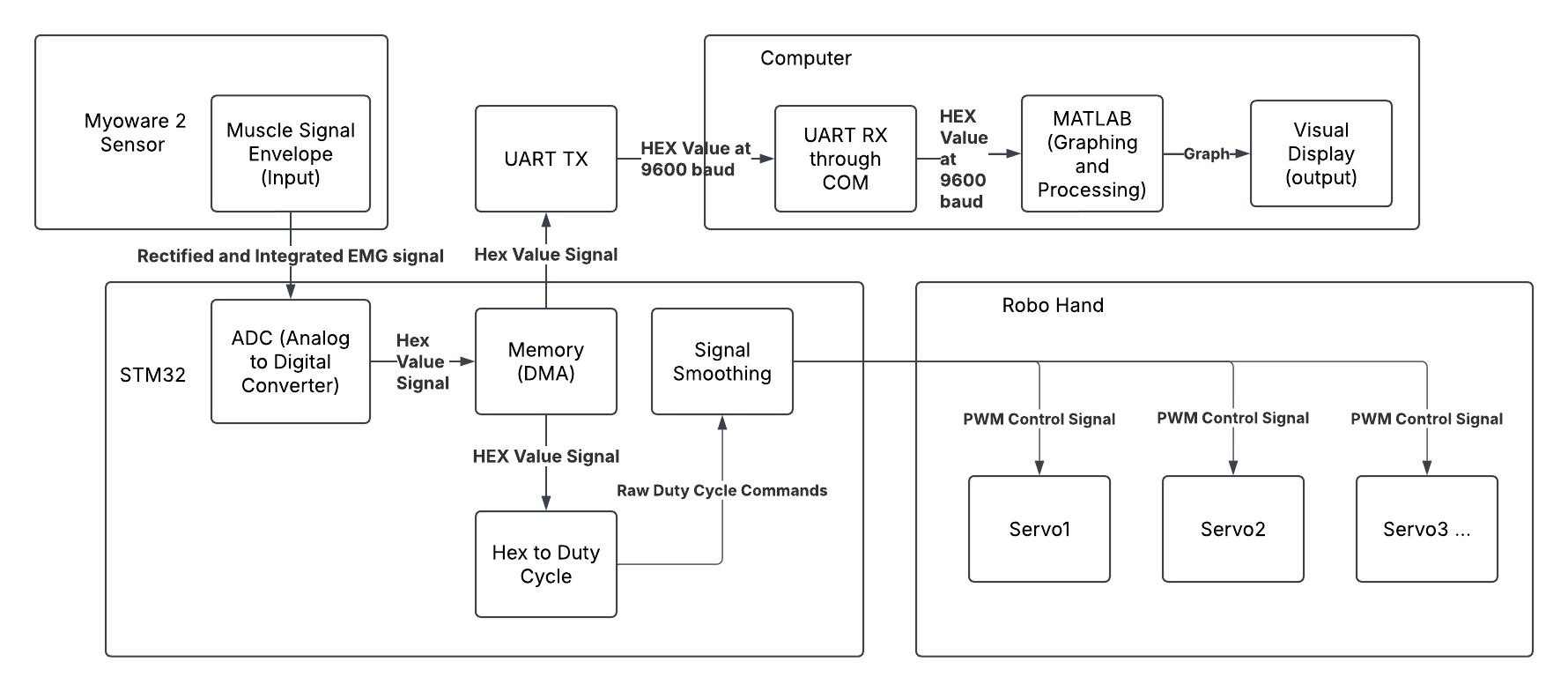
Methods
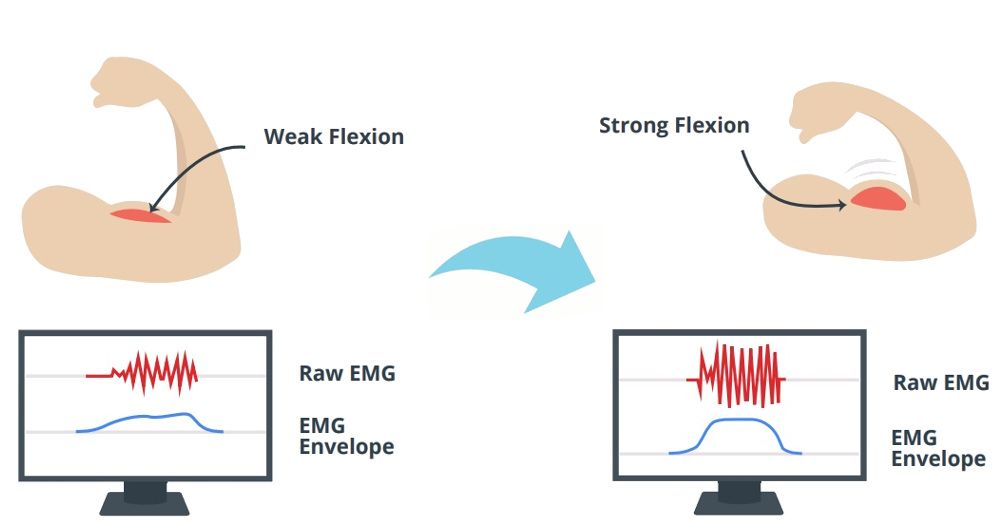
- The Myoware 2.0 reads the muscle signal and sends it to the STM32
- The STM32 samples the data with the ADC sent to DMA. This signal is then sent through UART to a computer to be graphed live.
- The same hex value signal is convered into servo duty cycle values. PWM signals are then sent to multiple timer channels.
- We 3d printed a hand that we designed to mimic a simplified human hand.
- We use a lithium ion battery with buck converters to power the STM32 and the servos without frying any components.
Conclusion
- The project works. The sensor allows the user to control the hand with ease. The hand was capable of holding and grasping objects.
- We proved that you can create functionality with less than $200. Further refinement could result in full control for a full prosthesis.
- The next steps would be to increase control by adding more sensors and more complex logic.
- This project taught us a lot about embedded programming. It firmly cemented a lot of ideas, and we spent a lot of time in the STM32 user guide and embedded textbook.
- We learned a great deal about modeling and 3d printing.