Mini Self-Driving Car
Team: Joshua Taggart
Project

-
Self-driving cars offer several potential benefits:
- Eliminate human factors that cause accidents (e.g., fatigue, distraction)
- Perform monotonous work like transporting goods over long distances
- Enable the elderly and disabled to travel independently
- While self-driving cars exist today, they could be safer, more reliable, and better able to adapt to new situations.
- I decided to build a mini self-driving car to acquire skills that will enable me to contribute to autonomous vehicle technology in the future.
-
The objective : create a robot car capable of driving within marked lanes on the road.
System
Methods
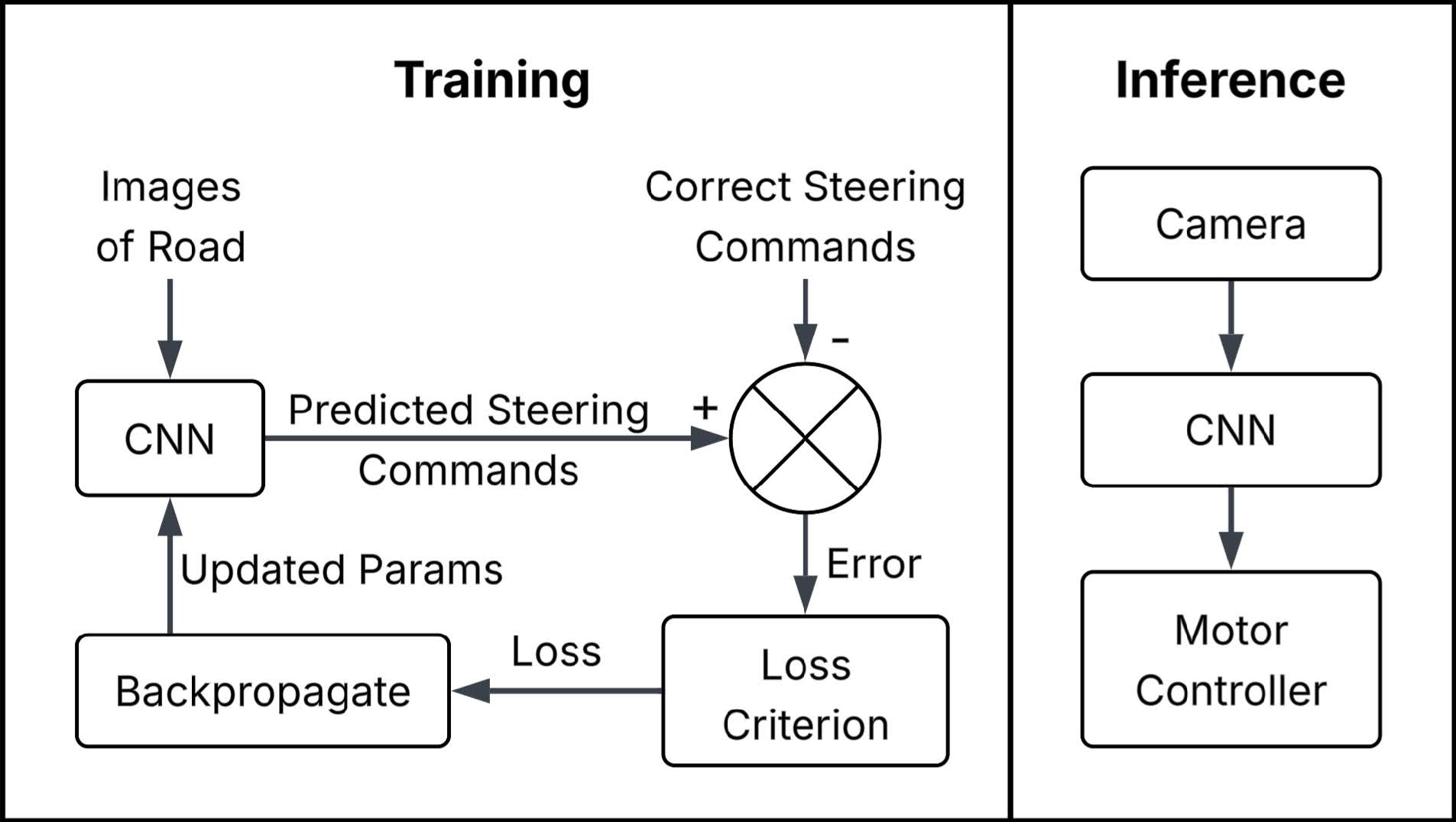
- The system consists of a camera, an onboard computer, a motor controller, drive motors, and a steering servo.
- A convolutional neural network (CNN) running on the onboard computer processes images from the camera and sends steering commands to the motor controller.
-
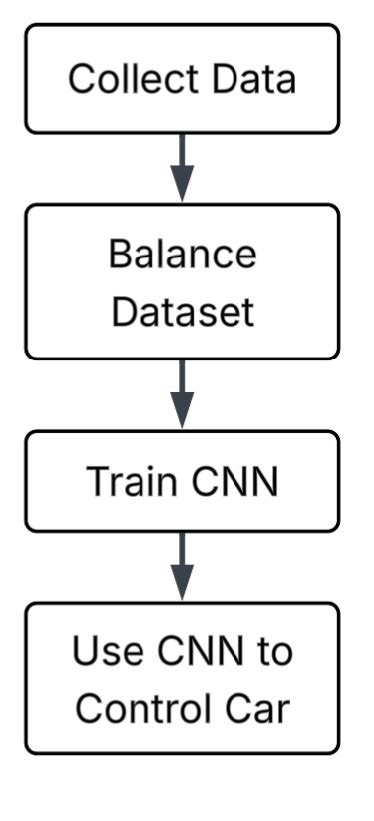
The model was trained using imitation learning:
- I drove the car around the track while recording the camera feed and steering inputs.
- I created a dataset by associating each frame from the video with a steering command.
- I balanced the dataset by ensuring equal amounts of images corresponded to driving straight, turning left, and turning right.
- I trained the model to associate images of the road with the correct steering action.
Conclusion
- The car successfully completed several laps around the track at a speed of 0.4 m/s without crossing the lane boundary.
- Running on CPU, the neural network processed images at a rate of 30 frames per second (FPS).
- When increasing the speed to 0.5 m/s, the car occasionally drifted outside the lane but was able to correct itself. This drift was likely due to the model not processing images fast enough.
-
Future work:
- Improve processing speed by optimizing the model (e.g., NVIDIA TensorRT) and running on GPU.
- Generalize the model by training it on a wide variety of roads in different lighting conditions.
Special thanks to Dr. Greg Droge for equipment.