Excavator Control System
Team: Brock Norris
Project
Problem
Modern excavators are difficult to operate without experience and even more difficult to use for precision work. The standard method utilizes two joysticks thatmove various parts of the excavator.Joystick inputs correspond to different movements depending on the excavator model.
Solution
The control system design solves these issues by:
- Creating an intuitive method for operating an excavator.
- Standardizing operation between excavator models.
- Providing a clear visualization of the excavator arm's motion.

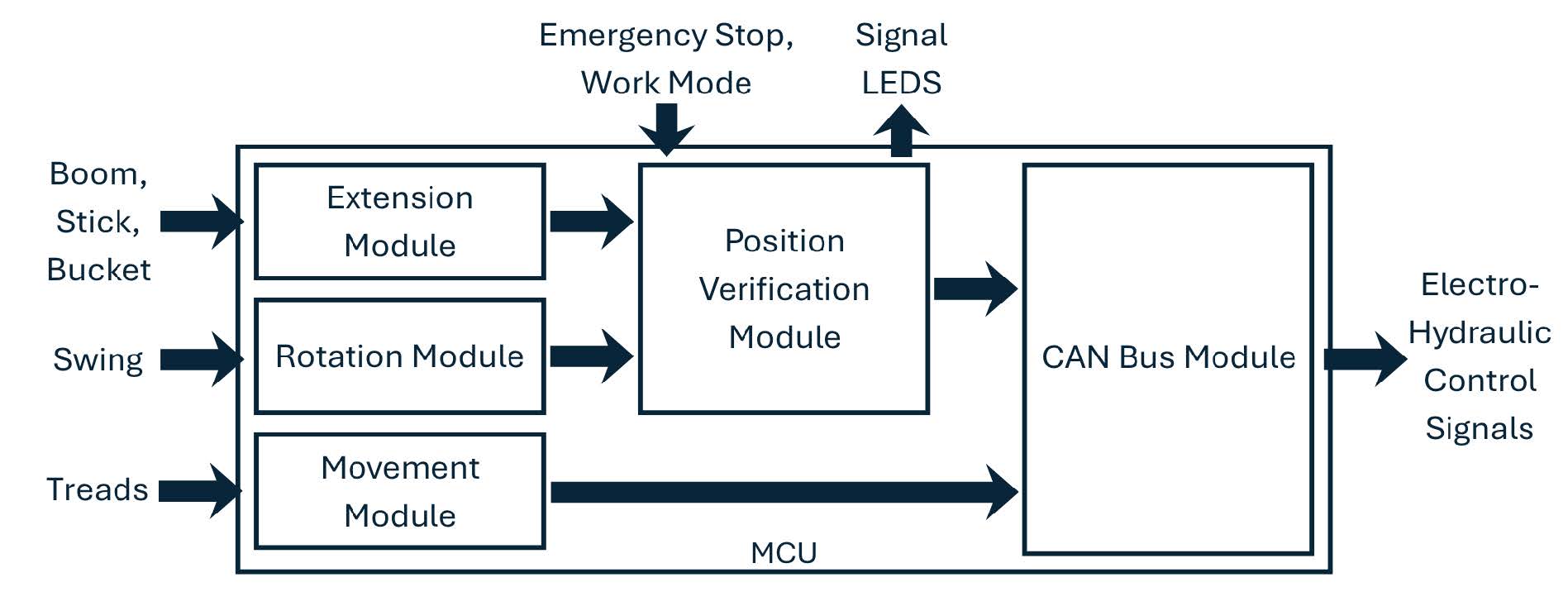
System Diagram
Methods
CAN Bus Communication
The system uses CAN bus communication, a protocol widely used in the automotive industry and in heavy machinery such asexcavators.Thisenables seamless plug-and-play integration with modern excavators.
Real Time Response
The system sends target positions for the various joints and swivel points of the excavator at a ~25kHz rate, even while the controller is actively moving. When the emergency stop button is pressed, a message is immediately sent to the excavator and all other communication is halted from the controller.
User and Component Safety
The system is fully enclosed and the max voltage leaving the base of the control system is 3.3V. This protects the components from dust and water that may be present in the environment and reduces the risk of shock for the operator.
Conclusion
Results
The control system is intuitive to operate and provides a clear visualization of theexcavator arm's motion. This enhances accessibility by reducing the learning curve for excavator operation.

Next Steps
- Research and adjustments need to be made to allow the control system to be installed into modern excavators.
- Further iterations of the system will need to focus on making the arm more durable and able to withstand a harsh environment.
- Testing in the real world needs to be done to verify that this system will improve the operation of a modern construction excavator.