Bipedal RL Walking Robot
Team: Spencer Gardner and Zac Maughan
Project
The Problem: Traditional bipedal control is manually intensive, while physical hardware testing is slow, expensive, and prone to damage.
The Solution: This project utilizes a Sim-to-Real Reinforcement Learning pipeline to:
- Accelerate Development: Rapidly train walking policies using NVIDIA's IsaacLab simulator.
- Reduce Costs: Iterate on locomotion logic in a risk-free virtual environment before hardware deployment.
- Optimize Performance: Generate robust control policies that adapt to physical hardware constraints.
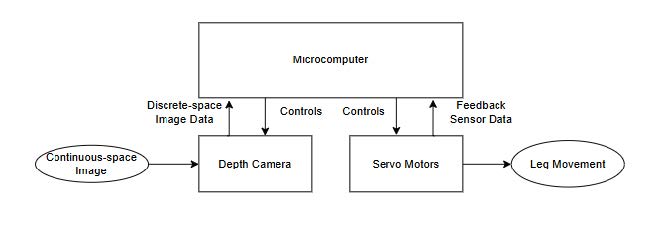
System
System Diagram
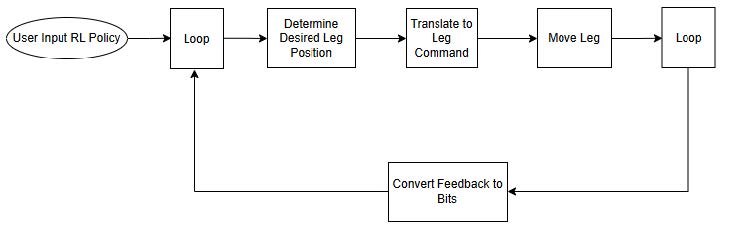
Software Diagram
Methods

Modeling the Robot in SolidWords

Training the model in IsaacLab
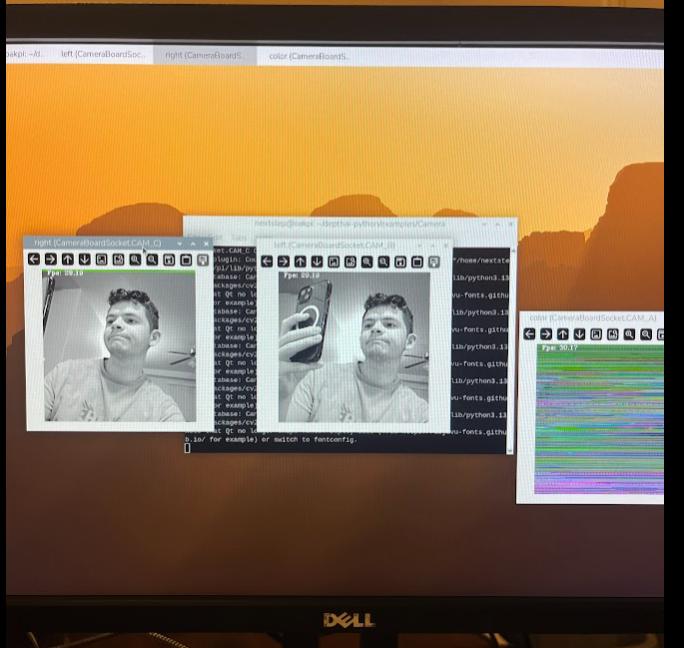
Interfacing Depth Camera
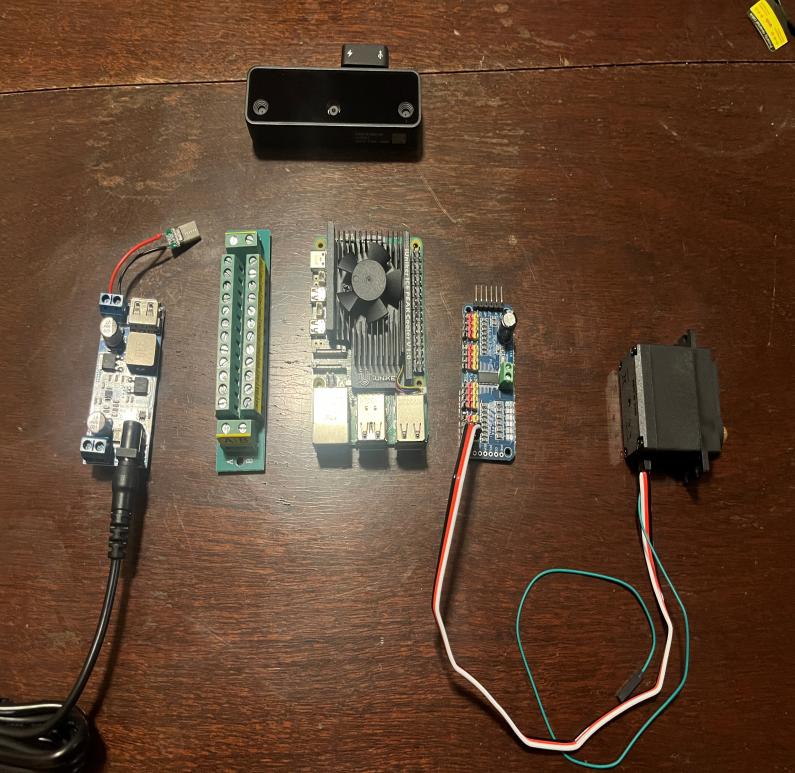
Assembling Hardware

Simulating Movement
Conclusion
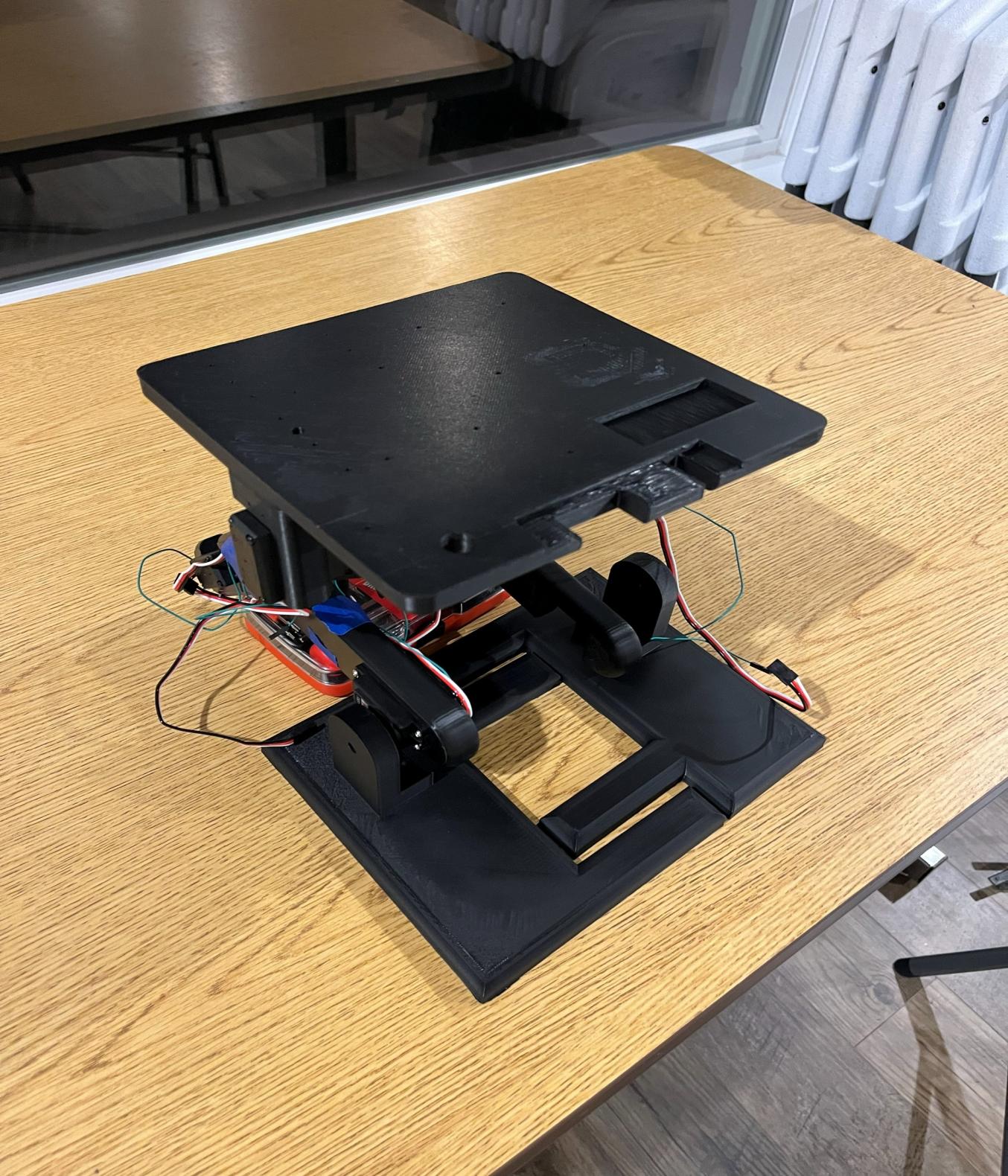
Completed Product
Lesson Learned
- Train a walking policy using Reinforcement Learning in IsaacLab
- Model and build a robot from ground up
- Interface electrical components using I²C
Future Work
- Connecting the Depth Camera to the walking policy so that the robot learns to avoid obstacles