A.E.R.Ω-X
Team: Tanner Chase, Jayse Hall and Anthony Wood
Project
UAS platforms are becoming more prevalent in both commercial and defense spaces. A focus on robust, modular platforms provide the reliability and flexibility these applications require.

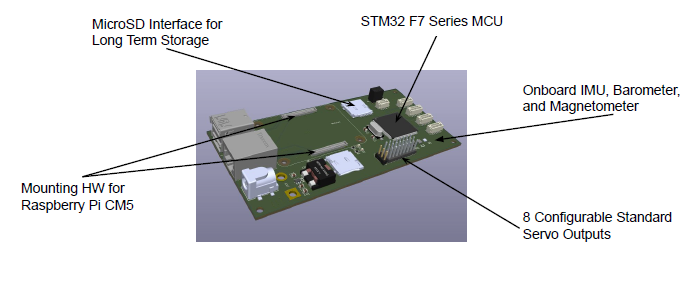
- We created a custom HW/SW stack to focus on modularity of both function and backend implementation.
- The inclusion of an onboard Raspberry PI 5 Compute Module allows for completely autonomous operation while still allowing high level path planning.
System
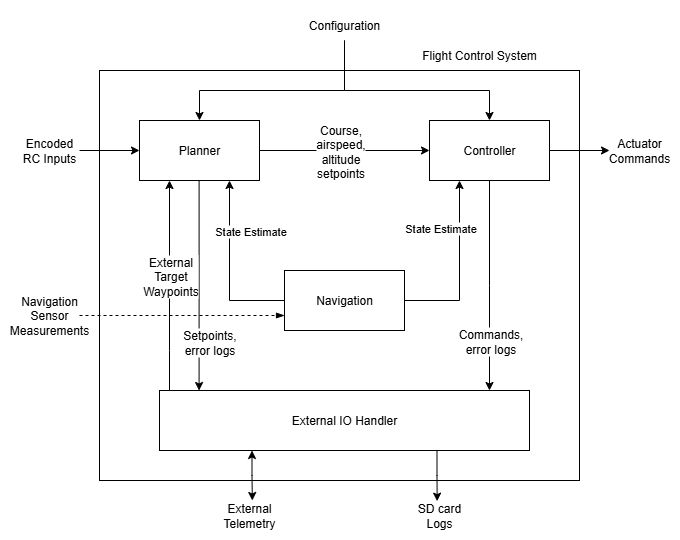
Methods
- Abstraced Hardware Interaction
- Configurable CMake Build Process
- Modifyable Runtime Config
- ChibiOS Backed RTOS
Conclusion
Our focus on modularity allows for fast switching between different boards without upstream effects.
- This allows much faster development of a new platform, as only the interfacing layer needs changing as opposed to redesign of the whole pipeline.
- The next step is to see how many different vehicle configurations (quad, rover, submarine, etc) can be supported with the same FCM and software stack.
- We all gained a much better understanding of control systems, computer architecture, and PCB design.