3D viewer GPS integration
Team: Jacob Lemon
Project
Cost effective drone lidar systems lack GPS data acquisition. Including GPS data would significantly improve accuracy and allow for more use cases of this technology.
Problem description and/or motivation
- Previous systems are too expensive or lack GPS data
- Lightweight, cost effective, easy to use drone system
- Applications in agriculture, environmental monitoring, and more
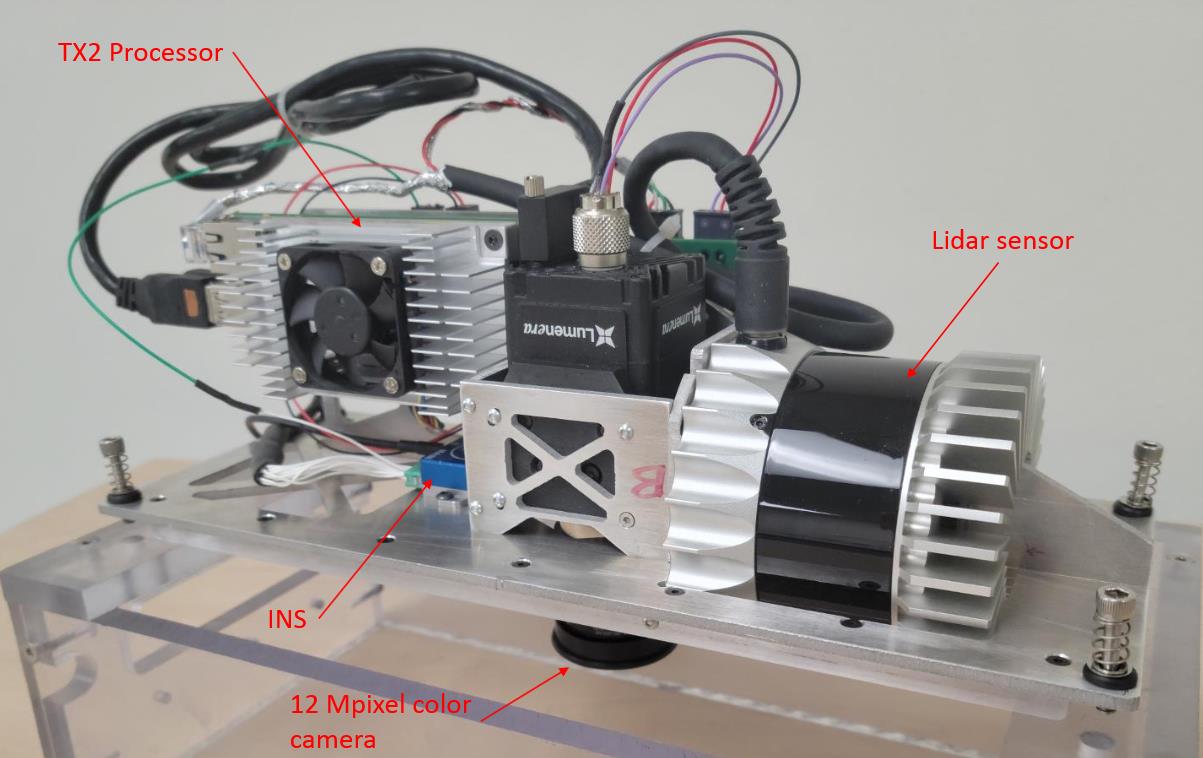
System

Methods
-
Using a new INS to gather accurate GPS data
- Hardware integration
- Software API updates
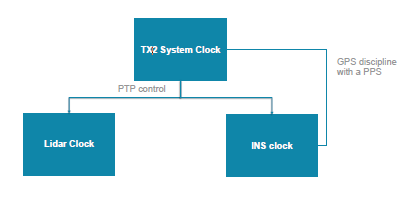
- Clock synchronization between components with a PTP
Conclusion
Results:
- The PTP synchronizes the clocks
- The new INS allows for a precise PPS and better GPS information
- Software improvements allow for better data acquisition
Future work
- Integrating the GPS data into the data visualization software
- Improvements to data processing algorithms