Fieldmarker
Team: Ryan Beck
Sponsor: Northrop Grumman
Project

- Autonomous drone capable of marking locations for cones on an outdoor sports field.
- Decrease work-load of coaches and event staff for sporting events
- GPS guided; proximity sensor monitored
- Attached spray paint and trigger mechanism.
System

Methods
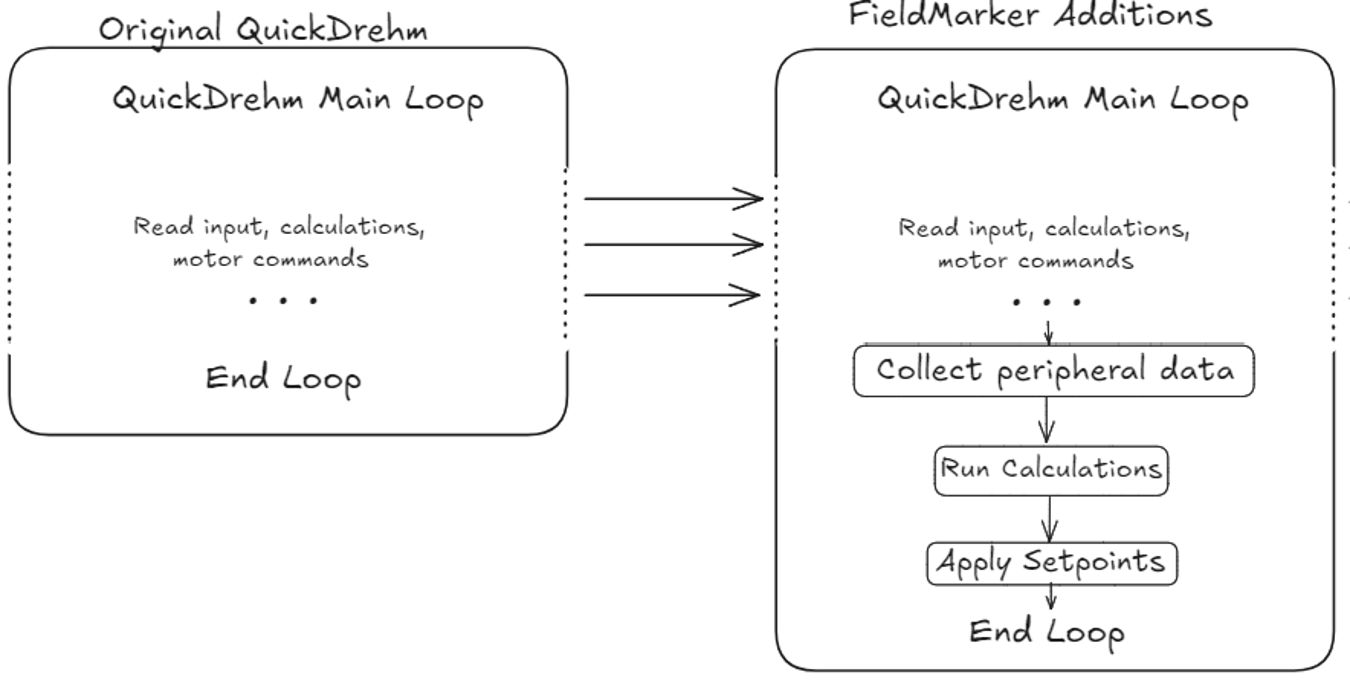
Built on dRhemFlight/QuickDrehm VTOL Teensy Flight Controller Project
- Allowed for drone flight and servo control
- PID Control
- Dynamic Notch Filter
Add Ons:
- GPS for pathing
- Proximity sensors for altitude correction and object avoidance
- Spray paint mechanism for marker placement
Conclusion
- Autonomous control of a mechanical system requires many sensors and real-time calculations
- Successfully collecting sensor data demonstrates project feasibility.
- Further insight into the GPS and compass module communication would bring the project to completion.
- I hope to continue the project and use the system myself