Using Machine Learning to Predict Soft-Robotic Motion
Team: Jacob Adams
Introduction
- Soft robotics is a new field of robotics that studies the manipulation of soft matter to perform robotic functions.
- This research developed a camera system and image-processing technique to measure the motion of our soft robot.
- We then trained a machine learning model to predict our robot’s motions for unique situations.
Methods
- The soft robot we made was 3D printed from an elastic TPU material to let the arm bend.
- We then measured the position of seven stickers along the robotic arm that are shown in Figure 1.
- To control the robot and measure its motion we created a data-collection chassis shown in Figure 2.
- The chassis is connected to a motor system that will pull a string that is connected to the arm which bends it back and forth.
- The data we collected was then used to train our machine-learning program and allows us to predict the robot’s motion.

Figure 1. Soft robot contained within the chassis
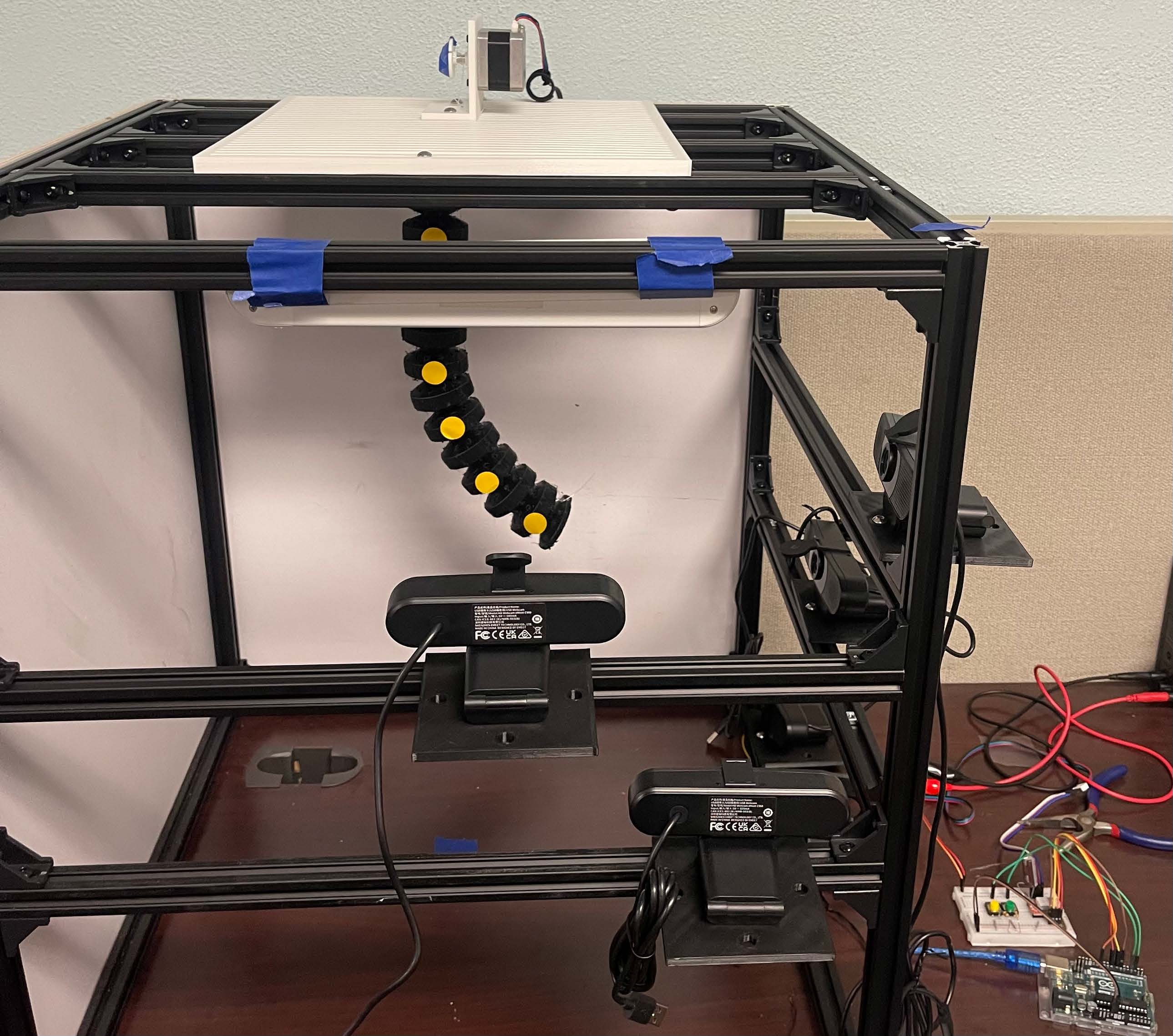
Figure 2. Overall soft robot and data collection system
Results
- Ultimately, this project was successful because we created a machine-learning model that can predict the motion of our robot in situations we did not train it on.
- We were able to successfully create an environment where the soft robot could be controlled and monitored at the same time.
- The chassis allowed us to collect meaningful data that was used to train the machine-learning model.
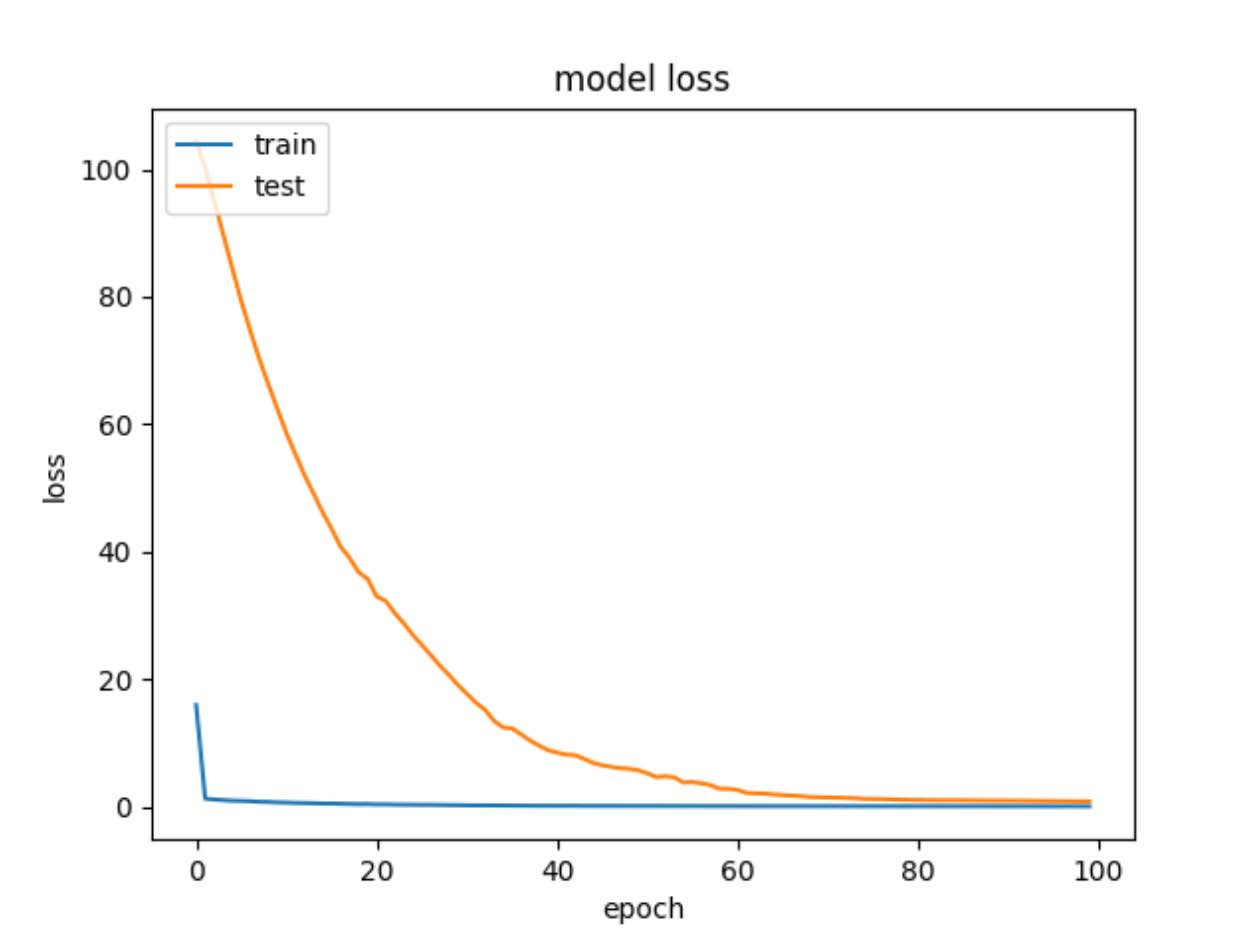
- The model training loss converged down to low values (see Figure 4) meaning we can predict information that closely follows the data we used for training.
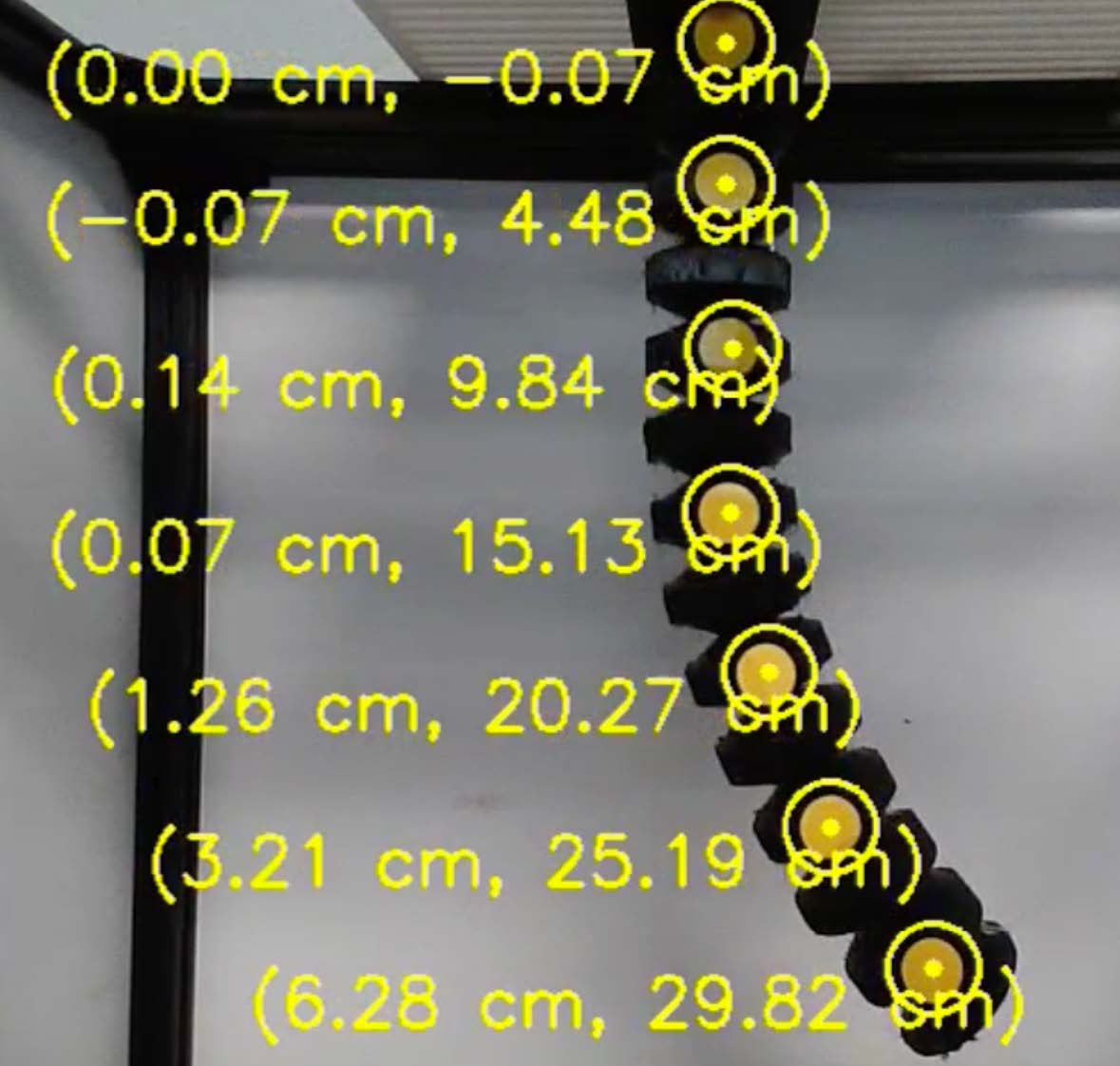
Figure 3. Camera frame after using color filtering to provide point coordinates
Figure 4. Progression of model training per epoch.
Future Work
- The next step in the research is to compare the machine-learning results to other research papers.
- This will help us learn more about how soft robots move.
- Doing so will allow people in the future to implement soft robots in our daily lives.

Figure 5. Y-position data over time from every position sticker as the robot undergoes deformation

Figure 6. X-position data over time from every position sticker as the robot undergoes deformation