ExoStance
Exoskeleton Segway -- Redefining the limits of Mobility
Team: Anna Von Niederhausern, Ashley Jensen, and Connor Lambert
Sponsor: USU Assistive Technologies
Project
- Currently, physically disablilities limit users to one option for transportation.
- Wheelchairs themselves are difficult to navigate many situations.
- Exoskeletons are expensive and impractical. It wears on the hardware.
- The ExoStance's light frame, and small footprint provides an effective alternative method of transportation to people with disabilities.
- Standing up in motion.
- Access to a vehicle without expensive modifications.
- Affordabable over offering.
System


Methods
- This project utilizes two existing electric unicycles, Secured to either side of the frame.
- Mechanical team designed a custom frame that houses electrical components and battery between the users’ legs. The frame can be easily disassembled.
- Electronics in the frame are powered by a 12V battery that provides power to the motor drivers and actuators. And DC/DC converter that provides 5V2 and STM32 microcontroller.
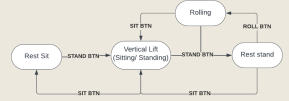
- User controls movement with a joystick and four buttons.
- External Interrupts read actuator positions into a model to control:
- Actuators at the hip and the knee allowed the user to sit and stand.
- Actuators on the wheels for turn assist.
- Actuators on the side of the base control balance on uneven ground.
- Kickstand controlled by actuators provides added stability.
Conclusion
- Project Successes
- Users are able to drive the ExoStance freely.
- User control of position and drive mode.
- Precise actuator control for user safety.
- Future Development
- This was a proof of concept that will be iterated to bring to market.
- More research on reading speed from the wheels for safety limitations.
- Next year, the engineers will refine the controller and implement wireless user interface.
- Next year's team will be urged to implement tilt sensing in control loops.
- Lessons Learned
- Interpretation of sensor data.
- Power Distribution and management.
- Control loop with analog input and pulse-width modulation.