Motion Capture Display System
Bridging the gap between the physical and digital worlds
Team: Grable Hart, Nathan Kwong
Special Thanks to: Colin Hart, Dr. Donald Cripps, and Dr. Jacob Gunther
Project
- Motion capture represents a growing trend, but requires a large up-front commitment and training
- Our motion capture system offers an easy-entry solution to hobbyists and professionals to view physical changes in digital space.
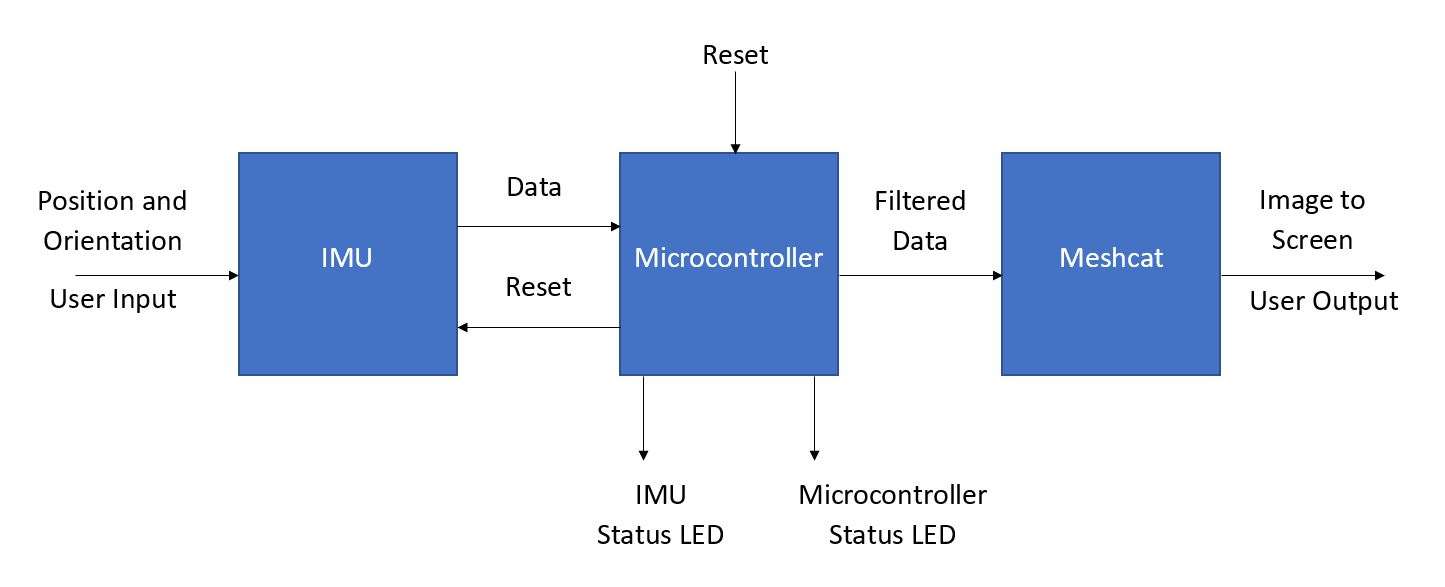
- The motion capture system uses an inertial measurement unit to sense movement from the user, then displays how the sensor has moved.
System
Methods
- The inertial measurement unit (IMU) measures linear acceleration, rotational velocity, and rotational position in the X, Y, and Z directions. Our design read these measurements, then converted the values to a position in digital space.
- Data collected by the IMU is influenced by small changes, called noise, which make the visualization jitter. Our design applied a filter which removed noise from the data and improved the visualization.
- The project used a Python library called Meshcat to perform the visualization.
- The microcontroller took the information from the IMU via Serial Peripheral Interface (SPI).
- Meshcat took the sensor measurements from the microcontroller via Universal Asynchronous Receiver Transmitter (UART) and provided the digital visualization.
Conclusion
- The result of our project was as a digital visualization which captured motion from a device.
- This project provides a means for additional research in the field for motion capture research
- This project provides an affordable method of visualizing a problem.
