Attitude Determination and Control System
Team: Daniel Crane, Jaydon Pierson, Ben Willard
Sponsor: USU Get Away Special Student Satellite Team
Project

- Get Away Special Student Satellite Team has a new mission that involves a directional patch antenna
- To accurately test the patch antenna, that satellite must be able to control its attitude (or orientation) to aim the antenna towards the earth
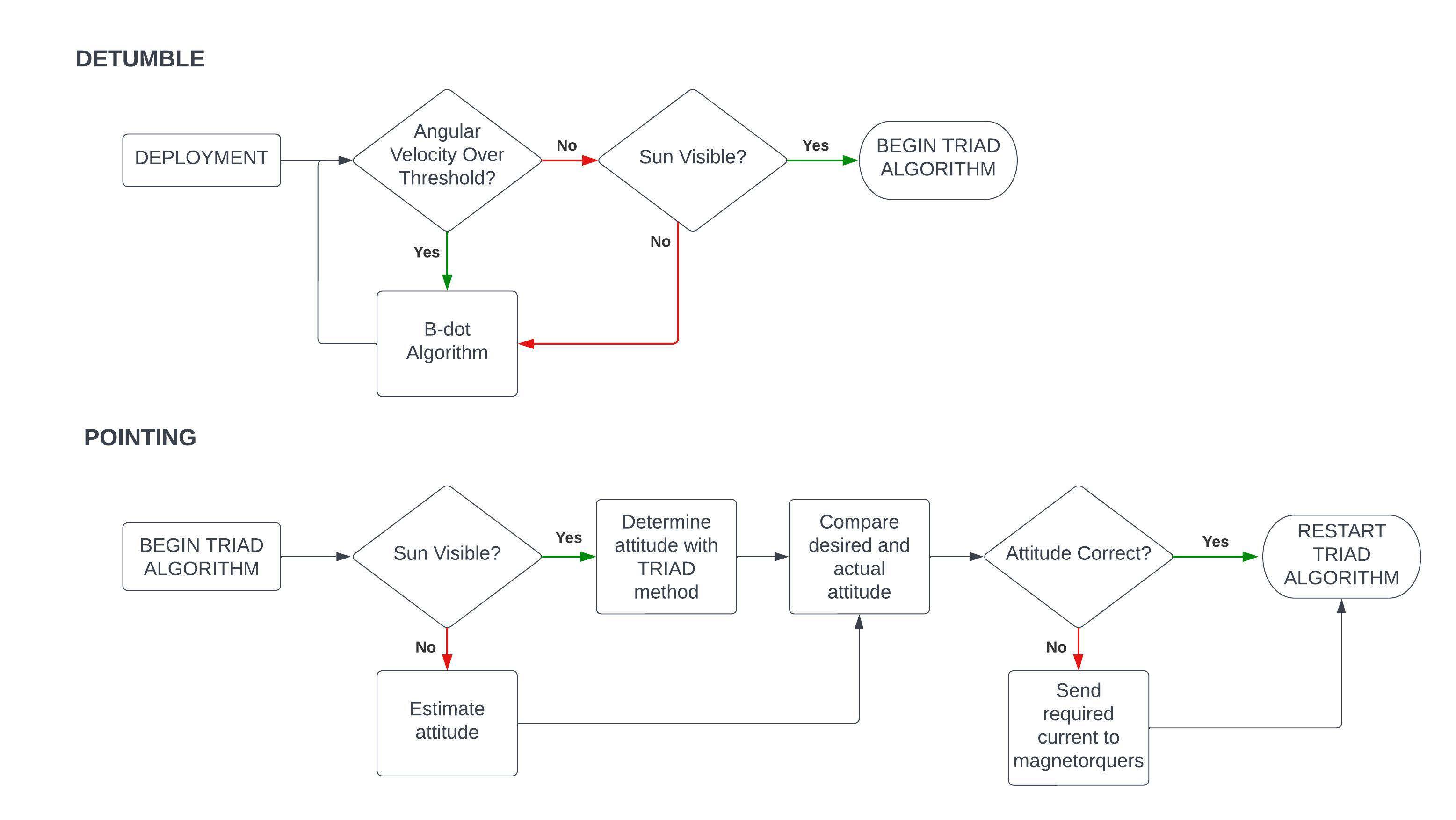
- Upon deployment, the satellite rotates with random angular velocity and first “detumbles” or reduces its angular velocity to near zero
- The satellite also determines its current attitude and “nadir points,” or orients the antenna towards the center of the earth
- The Attitude Determination and Control System (ADCS) performs the Detumble and Nadir Point functions
System
Methods
- The ADCS uses data from coarse sun sensors, magnetometers, and rate gyros
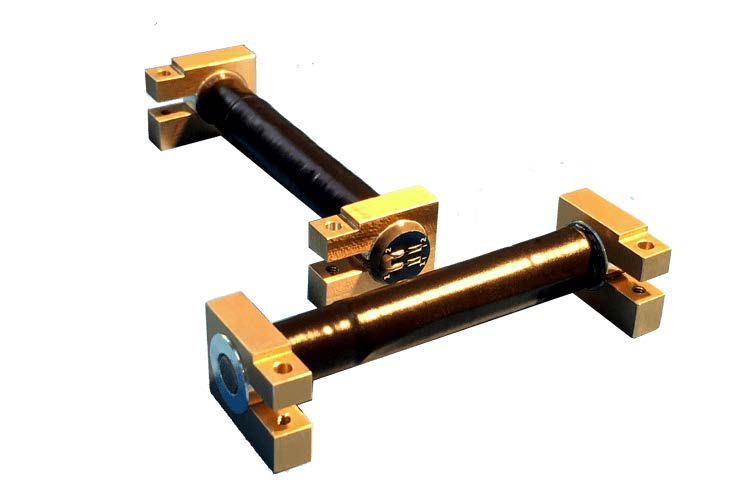
- Magnetorquers generate a magnetic moment, which interacts with the earth’s magnetic field to create a torque on the satellite
- The ADCS uses a B-Dot control algorithm to determine the required magnetic field the magnetorquers must generate to detumble
- To estimate the satellite’s attitude, the system uses ephemeris and magnetic field models compared to measured sun and magnetic field vectors (TRIAD method)
- The ADCS calculates the required torques to rotate the satellite to the desired nadir-pointing attitude
Conclusion

- Detumble control working and verified using Systems Tool Kit
- Satellite can detumble in a minimum of approximately 2 hours
- Slower detumble time can be chosen to limit power draw
- TRIAD attitude determination working properly and verified using Simulink
- Nadir pointing control in progress, further testing on magnetorquer control authority required